The HAptic GUidance System (HAGUS) is a device that I designed and built for my Master's thesis at the Media Lab. It began as a re-thought and re-designed version of the FielDrum, but ended up as a separate project. The underlying idea is the same as with the FielDrum (to explore the effect that physical guidance has on motor learning), but the devices are quite different. Whereas the FielDrum uses magnets for actuation, HAGUS uses a servo motor. There were a number of reasons why I decided to switch to a servo-based system, the most important of which was accuracy. I found it extrememly difficult to get the kind of control and measurement precision using electromagnets that are relatively easy to get out of a servo, encoder, and set of gears.
HAGUS, which was used in a set of motor learning experiments, can record and playback single-axis rotational motions that approximate those that the wrist undergoes during percussion performance. The design is fairly straightforward. A small-ish servo motor (40W) turns a shaft which runs to an electromagnetic particle clutch. The clutch is needed for "recording mode" where you want as little mechanical impedance presented to the user as possible. Particle clutches are a nice solution since they're electromagnetic and can therefore be operated with control logic and they offer a consistent and predictable (and linear) holding torque profile. The output of the clutch then runs through a high-precision (2000 line quadrature = 8000 ticks per revolution = .045 degree resolution) optical encoder and on to the drive gear. The 20 tooth drive gear then drives a section of 80 tooth gear which is connected to a drumstick. In "playback" mode, the encoder is used by the control electronics (motion control hardware from Jeffrey Kerr, LLC) in a PID feedback loop. In "recording" mode, it's simpy used to read the position of the drumstick at a reasonably high sampling rate (60Hz).
Photos

This is where the subject holds the device. |
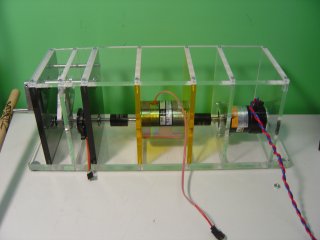
Here you can see, from left to right, the gearing, encoder, particle clutch, and servo motor. |

The actuator as well as a drumpad and the powersupply/control electronics. |

The complete setup (actuator, wrist cradle, control electronics, and drumpad). |
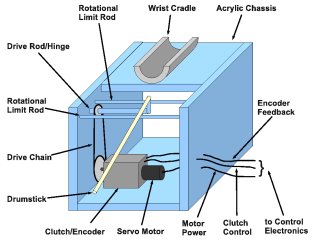
A very early design mockup. |
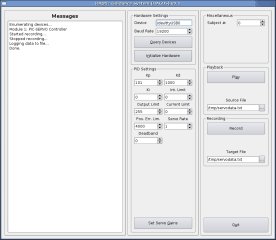
Screenshot of the software that I wrote for controlling the device and running experimental sessions. |
| |

Control hardware (PID control boards and an Arduino for miscellaneous controls) and the powersupply are housed in this box. |
|