Temporal Action Localization in Untrimmed Videos via Multi-stage CNNs.
Zheng Shou, Dongang Wang, and Shih-Fu Chang.
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2016.
Abstract
We address temporal action localization in untrimmed long videos. This is important because videos in real applications are usually unconstrained and contain multiple action instances plus video content of background scenes or other activities. To address this challenging issue, we exploit the effectiveness of deep networks in temporal action localization via three segment-based 3D ConvNets: (1) a proposal network identifies candidate segments in a long video that may contain actions; (2) a classification network learns one-vs-all action classification model to serve as initialization for the localization network; and (3) a localization network fine-tunes the learned classification network to localize each action instance. We propose a novel loss function for the localization network to explicitly consider temporal overlap and achieve high temporal localization accuracy. In the end, only the proposal network and the localization network are used during prediction. On two large-scale benchmarks, our approach achieves significantly superior performances compared with other state-of-the-art systems: mAP increases from 1.7% to 7.4% on MEXaction2 and increases from 15.0% to 19.0% on THUMOS 2014. Source code and trained models are available online at https://github.com/zhengshou/scnn.
Citing
@inproceedings{scnn_shou_wang_chang_cvpr16,
author = {Zheng Shou and Dongang Wang and Shih-Fu Chang},
title = {Temporal Action Localization in Untrimmed Videos via Multi-stage CNNs},
year = {2016},
booktitle = {CVPR}
}
Downloads
[Paper] [Poster] [Code] [Slides]
The Framework and Network Architecture
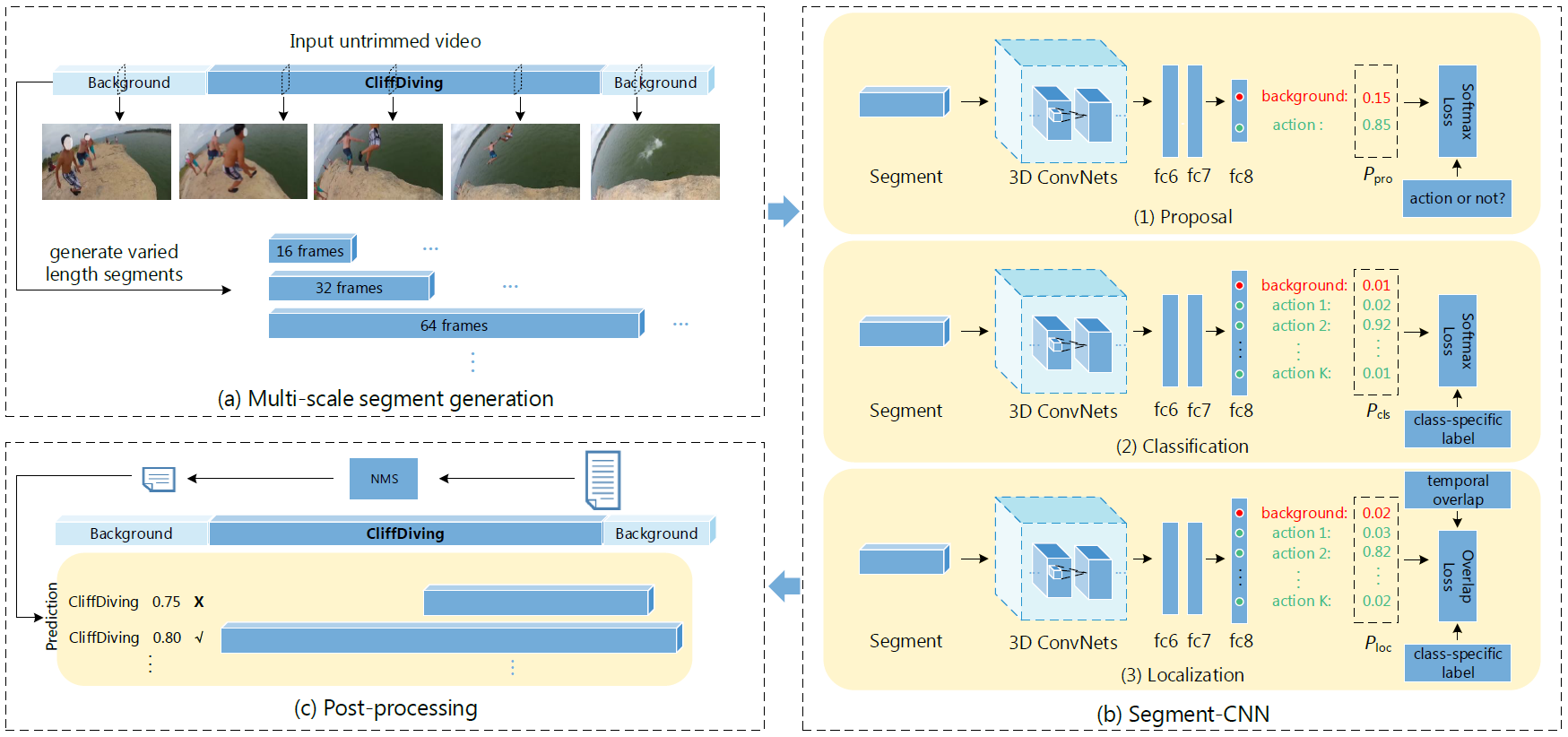
Overview of our framework. (a) Multi-scale segment generation: given an untrimmed video, we generate segments of varied lengths via sliding window; (b) Segment-CNN: the proposal network identifies candidate segments, the classification network trains an action recognition model to serve as initialization for the localization network, and the localization network localizes action instances in time and outputs confidence scores; (c) Post-processing: using the prediction scores from the localization network, we further remove redundancy by NMS to obtain the final results. During training, the classification network is first learned and then used as initialization for the localization network. During prediction, only the proposal and localization networks are used.
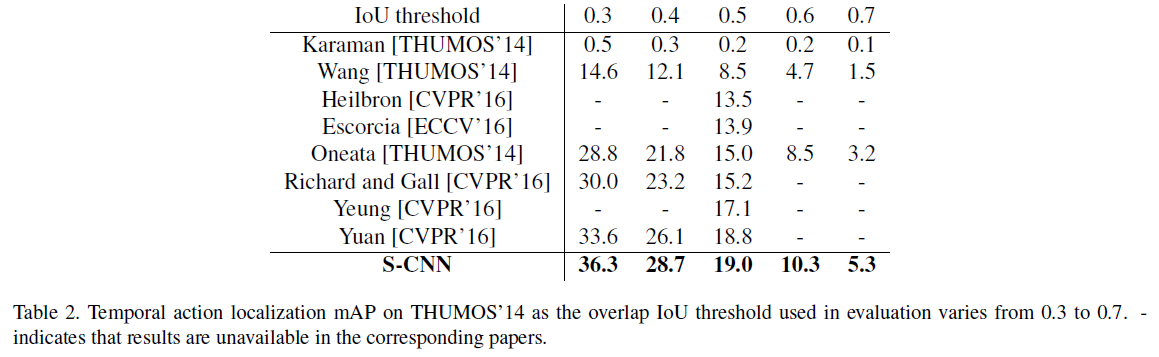
Results on THUMOS'14
Please refer to the paper for more details.
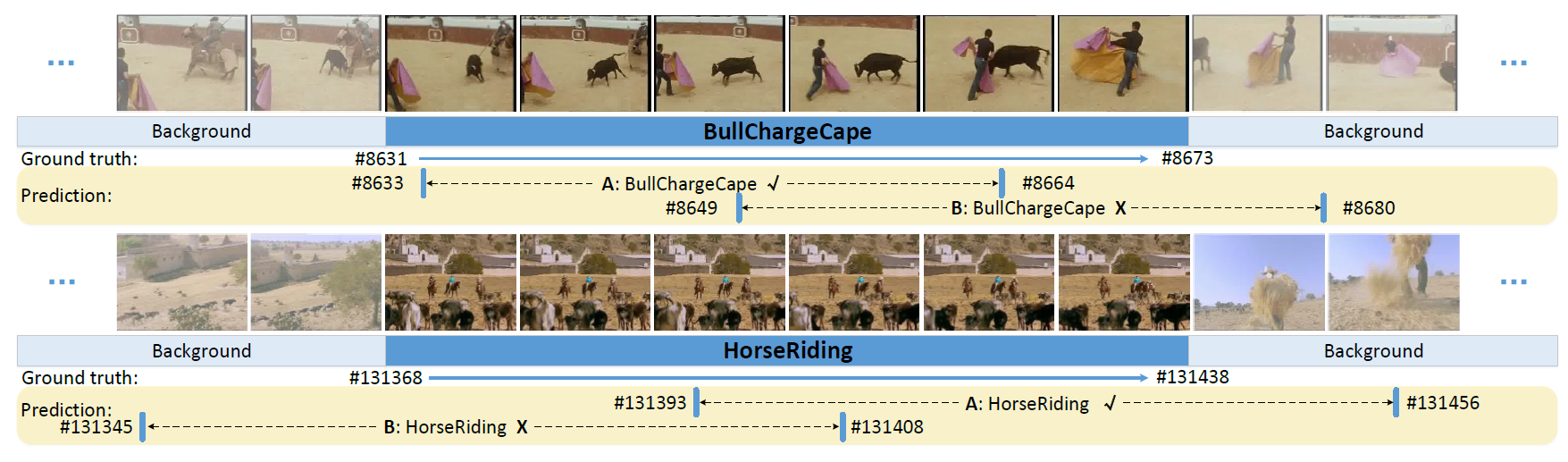
Visualization Examples
Prediction results for two action instances from MEXaction2 when the overlap threshold is set to 0.5 during evaluation. For each ground truth instance, we show two prediction results: A has the highest confidence score among the predictions associated with this ground truth, and B is an incorrect prediction. BullChargeCape: A is correct, but B is incorrect because each ground truth only allows one detection. HorseRiding: A is correct, but B is incorrect because each ground truth only allows one detection. The numbers shown with # are frame IDs.
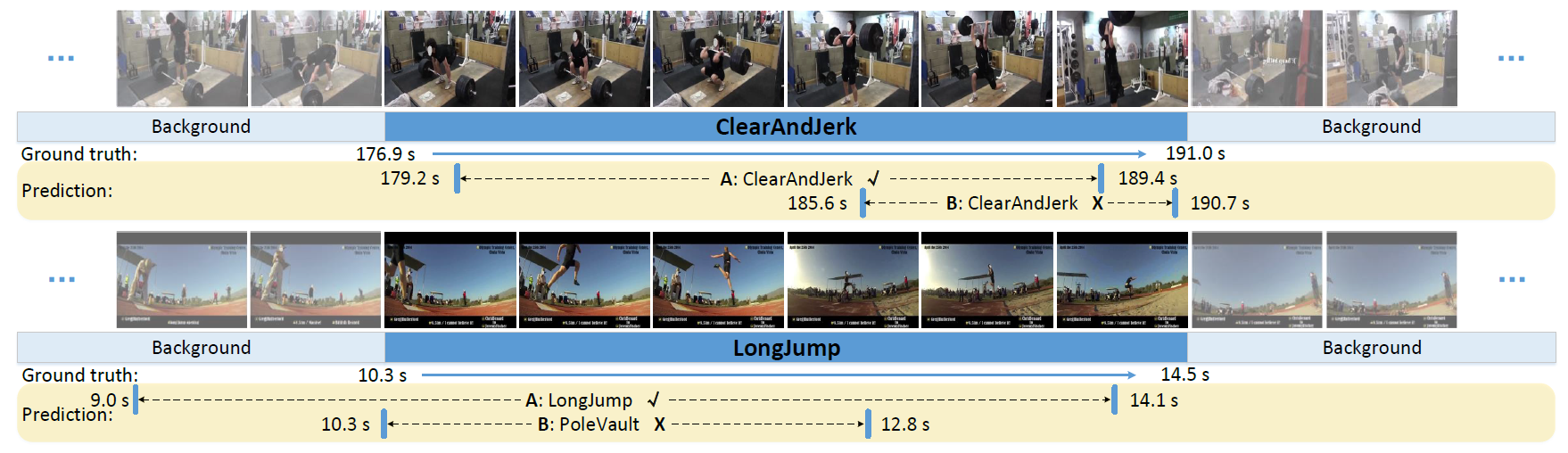
Prediction results for two action instances from THUMOS 2014 test set when the overlap threshold is set to 0.5 during evaluation. For each ground truth instance, we show two prediction results: A has the highest confidence score among the predictions associated with this ground truth, and B is an incorrect prediction. CleanAndJerk: A is correct, but B is incorrect because its overlap IoU with ground truth is less than threshold 0.5. LongJump: A is correct, but B is incorrect because it has the wrong action category prediction - PoleVault.
Acknowledgments
This work is supported by the Intelligence Advanced Research Projects Activity (IARPA) via Department of Interior National Business Center contract number D11PC20071. The U.S. Government is authorized to reproduce and distribute reprints for Governmental purposes notwithstanding any copyright annotation thereon. Disclaimer: The views and conclusions contained herein are those of the authors and should not be interpreted as necessarily representing the official policies or endorsements, either expressed or implied, of IARPA, DOI-NBC, or the U.S. Government. We thank Dong Liu, Guangnan Ye, and anonymous reviewers for the insightful suggestions.